
HL Paper 2
An ice-skater is skating such that her position vector when viewed from above at time seconds can be modelled by
with respect to a rectangular coordinate system from a point , where the non-zero constants and can be determined. All distances are in metres.
At time , the displacement of the ice-skater is given by and the velocity of the ice‑skater is given by .
Find the velocity vector at time .
Show that the magnitude of the velocity of the ice-skater at time is given by
.
Find the value of and the value of .
Find the magnitude of the velocity of the ice-skater when .
At a point , the ice-skater is skating parallel to the -axis for the first time.
Find .
A flying drone is programmed to complete a series of movements in a horizontal plane relative to an origin and a set of --axes.
In each case, the drone moves to a new position represented by the following transformations:
- a rotation anticlockwise of radians about
- a reflection in the line
- a rotation clockwise of radians about .
All the movements are performed in the listed order.
Write down each of the transformations in matrix form, clearly stating which matrix represents each transformation.
Find a single matrix that defines a transformation that represents the overall change in position.
Find .
Hence state what the value of indicates for the possible movement of the drone.
Three drones are initially positioned at the points , and . After performing the movements listed above, the drones are positioned at points , and respectively.
Show that the area of triangle is equal to the area of triangle .
Find a single transformation that is equivalent to the three transformations represented by matrix .
A ball is attached to the end of a string and spun horizontally. Its position relative to a given point, , at time seconds, , is given by the equation
where all displacements are in metres.
The string breaks when the magnitude of the ball’s acceleration exceeds .
Show that the ball is moving in a circle with its centre at and state the radius of the circle.
Find an expression for the velocity of the ball at time .
Hence show that the velocity of the ball is always perpendicular to the position vector of the ball.
Find an expression for the acceleration of the ball at time .
Find the value of at the instant the string breaks.
How many complete revolutions has the ball completed from to the instant at which the string breaks?
A transformation, , of a plane is represented by , where is a matrix, is a vector, is the position vector of a point in the plane and the position vector of its image under .
The triangle has coordinates , and . Under T, these points are transformed to , and respectively.
can be written as , where and are matrices.
represents an enlargement with scale factor , centre .
represents a rotation about .
The transformation can also be described by an enlargement scale factor , centre , followed by a rotation about the same centre .
By considering the image of , find .
By considering the image of and , show that
.
Write down the matrix .
Use to find the matrix .
Hence find the angle and direction of the rotation represented by .
Write down an equation satisfied by .
Find the value of and the value of .
A sector of a circle, centre and radius , is shown in the following diagram.

A square field with side has a goat tied to a post in the centre by a rope such that the goat can reach all parts of the field up to from the post.

[Source: mynamepong, n.d. Goat [image online] Available at: https://thenounproject.com/term/goat/1761571/
This file is licensed under the Creative Commons Attribution-ShareAlike 3.0 Unported (CC BY-SA 3.0)
https://creativecommons.org/licenses/by-sa/3.0/deed.en [Accessed 22 April 2010] Source adapted.]
Let be the volume of grass eaten by the goat, in cubic metres, and be the length of time, in hours, that the goat has been in the field.
The goat eats grass at the rate of .
Find the angle .
Find the area of the shaded segment.
Find the area of the field that can be reached by the goat.
Find the value of at which the goat is eating grass at the greatest rate.
The goat is tied in the field for hours.
Find the total volume of grass eaten by the goat during this time.
Consider the curve .
The shape of a piece of metal can be modelled by the region bounded by the functions , , the -axis and the line segment , as shown in the following diagram. The units on the and axes are measured in metres.

The piecewise function is defined by
The graph of is obtained from the graph of by:
- a stretch scale factor of in the direction,
- followed by a stretch scale factor in the direction,
- followed by a translation of units to the right.
Point lies on the graph of and has coordinates . Point is the image of under the given transformations and has coordinates .
The piecewise function is given by
The area enclosed by , the -axis and the line is correct to six significant figures.
Find .
Hence show that the equation of the tangent to the curve at the point is .
Find the value of and the value of .
Find an expression for.
Find the value of .
Find the value of .
Find the area enclosed by , the -axis and the line .
Find the area of the shaded region on the diagram.
The cost adjacency matrix for the complete graph K6 is given below.

It represents the distances in kilometres along dusty tracks connecting villages on an island. Find the minimum spanning tree for this graph; in all 3 cases state the order in which the edges are added.
It is desired to tarmac some of these tracks so that it is possible to walk from any village to any other village walking entirely on tarmac.
Briefly explain the two differences in the application of Prim’s and Kruskal’s algorithms for finding a minimum spanning tree in a weighted connected graph.
Using Kruskal’s algorithm.
Using Prim’s algorithm starting at vertex A.
Using Prim’s algorithm starting at vertex F.
State the total minimum length of the tracks that have to be tarmacked.
Sketch the tracks that are to be tarmacked.
At an archery tournament, a particular competition sees a ball launched into the air while an archer attempts to hit it with an arrow.
The path of the ball is modelled by the equation
where is the horizontal displacement from the archer and is the vertical displacement from the ground, both measured in metres, and is the time, in seconds, since the ball was launched.
- is the horizontal component of the initial velocity
- is the vertical component of the initial velocity.
In this question both the ball and the arrow are modelled as single points. The ball is launched with an initial velocity such that and .
An archer releases an arrow from the point . The arrow is modelled as travelling in a straight line, in the same plane as the ball, with speed and an angle of elevation of .
Find the initial speed of the ball.
Find the angle of elevation of the ball as it is launched.
Find the maximum height reached by the ball.
Assuming that the ground is horizontal and the ball is not hit by the arrow, find the coordinate of the point where the ball lands.
For the path of the ball, find an expression for in terms of .
Determine the two positions where the path of the arrow intersects the path of the ball.
Determine the time when the arrow should be released to hit the ball before the ball reaches its maximum height.
The matrices A and B are defined by and .
Triangle X is mapped onto triangle Y by the transformation represented by AB. The coordinates of triangle Y are (0, 0), (−30, −20) and (−16, 32).
Describe fully the geometrical transformation represented by B.
Find the coordinates of triangle X.
Find the area of triangle X.
Hence find the area of triangle Y.
Matrix A represents a combination of transformations:
A stretch, with scale factor 3 and y-axis invariant;
Followed by a stretch, with scale factor 4 and x-axis invariant;
Followed by a transformation represented by matrix C.
Find matrix C.
Let G be the graph below.

Find the total number of Hamiltonian cycles in G, starting at vertex A. Explain your answer.
Find a minimum spanning tree for the subgraph obtained by deleting A from G.
Hence, find a lower bound for the travelling salesman problem for G.
Give an upper bound for the travelling salesman problem for the graph above.
Show that the lower bound you have obtained is not the best possible for the solution to the travelling salesman problem for G.
The matrix A is defined by .
Pentagon, P, which has an area of 7 cm2, is transformed by A.
The matrix B is defined by .
B represents the combined effect of the transformation represented by a matrix X, followed by the transformation represented by A.
Describe fully the geometrical transformation represented by A.
Find the area of the image of P.
Find the matrix X.
Describe fully the geometrical transformation represented by X.
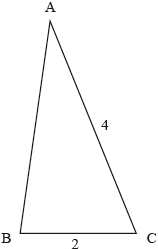
In triangle and .
Consider the possible triangles with .
Consider the case where , the length of QR is not fixed at 8 cm.
Use the cosine rule to show that .
Calculate the two corresponding values of PQ.
Hence, find the area of the smaller triangle.
Determine the range of values of for which it is possible to form two triangles.
Find the set of values of that satisfy the inequality .
The triangle ABC is shown in the following diagram. Given that , find the range of possible values for AB.
A water trough which is 10 metres long has a uniform cross-section in the shape of a semicircle with radius 0.5 metres. It is partly filled with water as shown in the following diagram of the cross-section. The centre of the circle is O and the angle KOL is radians.
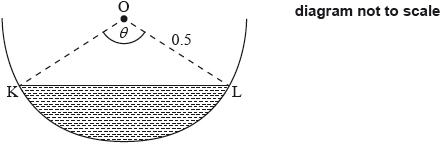
The volume of water is increasing at a constant rate of .
Find an expression for the volume of water in the trough in terms of .
Calculate when .
An aircraft’s position is given by the coordinates (, , ), where and are the aircraft’s displacement east and north of an airport, and is the height of the aircraft above the ground. All displacements are given in kilometres.
The velocity of the aircraft is given as .
At 13:00 it is detected at a position 30 km east and 10 km north of the airport, and at a height of 5 km. Let be the length of time in hours from 13:00.
If the aircraft continued to fly with the velocity given
When the aircraft is 4 km above the ground it continues to fly on the same bearing but adjusts the angle of its descent so that it will land at the point (0, 0, 0).
Write down a vector equation for the displacement, r of the aircraft in terms of .
verify that it would pass directly over the airport.
state the height of the aircraft at this point.
find the time at which it would fly directly over the airport.
Find the time at which the aircraft is 4 km above the ground.
Find the direct distance of the aircraft from the airport at this point.
Given that the velocity of the aircraft, after the adjustment of the angle of descent, is , find the value of .
Two submarines A and B have their routes planned so that their positions at time t hours, 0 ≤ t < 20 , would be defined by the position vectors rA and rB relative to a fixed point on the surface of the ocean (all lengths are in kilometres).
To avoid the collision submarine B adjusts its velocity so that its position vector is now given by
rB .
Show that the two submarines would collide at a point P and write down the coordinates of P.
Find the value of t when submarine B passes through P.
Find the value of t when the two submarines are closest together.
Find the distance between the two submarines at this time.
A canal system divides a city into six land masses connected by fifteen bridges, as shown in the diagram below.

State with reasons whether or not this graph has
Draw a graph to represent this map.
Write down the adjacency matrix of the graph.
List the degrees of each of the vertices.
an Eulerian circuit.
an Eulerian trail.
Find the number of walks of length 4 from E to F.
The following table shows the costs in US dollars (US$) of direct flights between six cities. Blank cells indicate no direct flights. The rows represent the departure cities. The columns represent the destination cities.

The following table shows the least cost to travel between the cities.

A travelling salesman has to visit each of the cities, starting and finishing at city A.
Show the direct flights between the cities as a graph.
Write down the adjacency matrix for this graph.
Using your answer to part (b), find the number of different ways to travel from and return to city A in exactly 6 flights.
State whether or not it is possible to travel from and return to city A in exactly 6 flights, having visited each of the other 5 cities exactly once. Justify your answer.
Find the values of and .
Use the nearest neighbour algorithm to find an upper bound for the cost of the trip.
By deleting vertex A, use the deleted vertex algorithm to find a lower bound for the cost of the trip.
The adjacency matrix of the graph G, with vertices P, Q, R, S, T is given by:
Draw the graph of G.
Define an Eulerian circuit.
Write down an Eulerian circuit in G starting at P.
Define a Hamiltonian cycle.
Explain why it is not possible to have a Hamiltonian cycle in G.
Find the number of walks of length 5 from P to Q.
Which pairs of distinct vertices have more than 15 walks of length 3 between them?
Consider the following diagram.

The sides of the equilateral triangle ABC have lengths 1 m. The midpoint of [AB] is denoted by P. The circular arc AB has centre, M, the midpoint of [CP].
Find AM.
Find the area of the shaded region.
The diagram shows two circles with centres at the points A and B and radii and , respectively. The point B lies on the circle with centre A. The circles intersect at the points C and D.

Let be the measure of the angle CAD and be the measure of the angle CBD in radians.
Find an expression for the shaded area in terms of , and .
Show that .
Hence find the value of given that the shaded area is equal to 4.
In triangle ABC, AB = 5, BC = 14 and AC = 11.
Find all the interior angles of the triangle. Give your answers in degrees to one decimal place.
In a triangle and .
Use the cosine rule to find the two possible values for AC.
Find the difference between the areas of the two possible triangles ABC.
Boat A is situated 10km away from boat B, and each boat has a marine radio transmitter on board. The range of the transmitter on boat A is 7km, and the range of the transmitter on boat B is 5km. The region in which both transmitters can be detected is represented by the shaded region in the following diagram. Find the area of this region.
